
Robot di stampaggio à 4 assi per macchina di pressa



Introduzione di u produttu
In vista di a dumanda attuale per l'aghjurnamentu è a trasfurmazione di l'industria di stampaggio, hè statu cuncipitu è sviluppatu un robot di gestione di stampaggio à 4 assi di alta flessibilità è cuntrollu simplice.
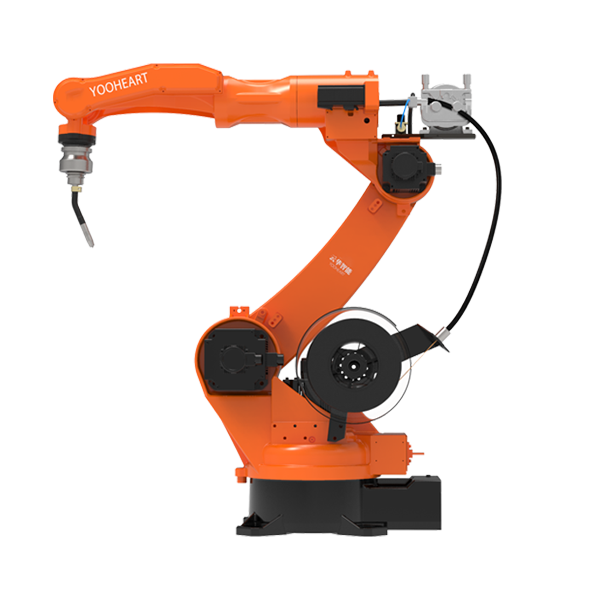
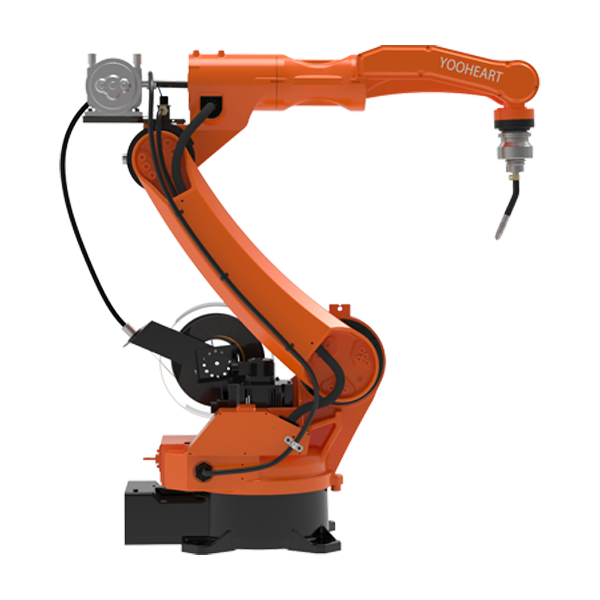
U robot di stampaggio à quattru assi adotta un design à quattru assi, forma compatta, dimensioni ridotte, pesu ligeru, largamente utilizatu in a saldatura à arcu d'argon, a palettizzazione, a manipolazione, a stampatura è altri campi, pò cumpletà una manipolazione stabile, una saldatura precisa. U manipulatore di punzonatura à quattru assi pò realizà l'operazione di stampatura in modu flessibile in un picculu spaziu, è hè simplice è cunveniente da installà è debugà.
Parti principali
Tutte e parti di marca cinese di alta qualità
Servomotore
A marca di u servomotore hè Ruking, una marca cinese cù i vantaghji di una reazione rapida, un grande rapportu coppia/inerzia di coppia di partenza è cusì. Pò suppurtà cundizioni operative difficili chì effettuanu operazioni di accelerazione è decelerazione in avanti è in daretu assai frequenti è pò suppurtà parechje volte u sovraccaricu in pocu tempu.
SISTEMA DI CONTROLLU LNC
U robot Yooheart adotta a prugrammazione d'insignamentu. Hè simplice, cunveniente è flessibile in funziunamentu. U robot Yooheart supporta ancu a prugrammazione remota, chì pò esse applicata in una varietà di prugrammi cumplessi.
CORPU DI ROBOT
U corpu adotta u prucessu di fusione à pressione, aduprendu a cavità di u stampu per applicà una alta pressione à a furmazione di metallu in fusione, u corpu chì forma alta densità, forte rigidità, u so propiu pesu hè più ligeru.
Mostra di dettagli
Alta Precisione
Risposta d'azione rapida
È u livellu hè di punta
in u paese
Simplice in struttura
Facile à mantene
Più economicu
Alta velocità è stabilità
Percorsu precisu
Soluzioni di stampaggio perfette
Parametru di u Robot
| Prughjettu | Specificazione | Prughjettu | Specificazione | Asse | Gamma di muvimentu | Velocità massima | Dia vuota |
| Asse | 4 | Temperatura | 0℃-45℃ | J1 | ±170º | 190º/s | —— |
| Capacità | 3,7 KVA | Umidità | 20-80% RH (Senza umidità) | J2 | +10º~+125º | 120º/s | —— |
| Pesu | 170 chilò | Vibrazione | Sottu à 4,9M/S² | J3 | +10º~-95º | 120º/s | —— |
| Carica utile massima | 10 chilò | Altri | Nisun gasu è liquidu inflammabile è corrosivu, tene luntanu da fonti di rumore elettricu | J4 | ±360º | 200º/s | —— |
| Gamma massima di travagliu | 140 cm | Ripetibilità | ±0,08 mm | Livellu IP | IP65 | Installazione | Terra |
Applicazione di robot
Caricamentu è scaricamentu di u pruduttu d'estrusione à caldu
Stu prughjettu hè principalmente per a furmazione di stampa di rame. U prucessu di punzonatura rossa hè un prucessu di estrusione à caldu. Durante a punzonatura rossa, u materiale metallicu hè riscaldatu à una certa temperatura è messu in u stampu preriscaldatu. Dopu à u muvimentu alternativu unicu di a macchina utensile à pressione, u materiale metallicu hè deformatu plasticamente per ottene a dimensione, a forma è e bone proprietà meccaniche richieste di e parti di stampa. U cliente adotta u robot di movimentazione à 4 assi Yooheart per caricà è scaricà u pezzu di travagliu metallicu punzonatu rossu.
Panoramica di a Soluzione d'Integrazione
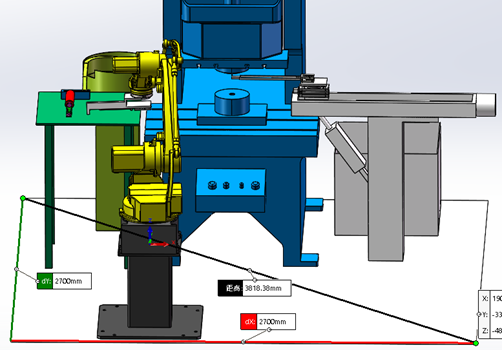
U prugettu hè custituitu da una punzonatrice, un robot Yunhua à 4 assi di 10 kg, utensili di pusizionamentu secundariu, un dispositivu di tranciatura di cumbinazione di cilindri è cusì via. I dati cunnisciuti cum'è u tempu di battitura, u caricu nominale è e cundizioni di travagliu sò tutti in l'intervallu di parametri nominali di HY1010B-140.


Panoramica di u prucessu di pruduzzione
Alimentazione manuale per parancu ▶ alimentazione di piastre vibranti ▶ Posizionamentu di u dispusitivu di alimentazione prima di u riscaldamentu ▶ riscaldamentu di tubi à currenti parassite ▶ posizionamentu di u dispusitivu di pusizionamentu secundariu ▶ serraggio di robot ▶ pressatura di punzonatrice ▶ scaricamentu di u dispusitivu di alimentazione di cilindri
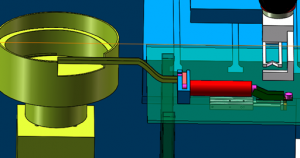
Riassuntu di l'azione di u dispusitivu di alimentazione è di pusizionamentu
Alimentà a piastra vibrante manualmente ▶ A piastra vibrante hè l'alimentazione di materiale per u tubu di riscaldamentu à currenti parassite ▶ U strumentu di pusizionamentu secundariu hè u pusizionamentu di a pinza di u robot
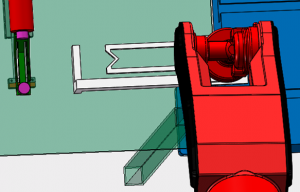
Panoramica di l'azione di u dispusitivu di serraggio
U robot serrarà u materiale di rame pusizionatu ▶ per a furmazione di punzoni
Serviziu dopu à a vendita
Avemu un serviziu perfettu dopu a consegna per aiutà vi à amparà l'operazione ancu s'è vo ùn avete mai utilizatu robot industriali è risolve i prublemi durante u vostru tempu d'usu.
Prima, furniremu i manuali relativi per aiutà vi à capisce alcune informazioni nantu à i robot.
Siconda, vi prupuneremu una seria di video d'insignamentu. Pudete seguità sti video passu à passu da u cablaggio, a prugrammazione simplice à u cumpletamentu di prugrammi cumplessi. Hè u modu u più efficace per aiutà vi in e circustanze di covid.
Infine, furniremu un serviziu in linea cù più di 20 tecnichi. Sè avete qualchì quistione, pudete cuntattateci in ogni mumentu è vi aiuteremu subitu.


RFQ
D. Questu hè sicuru per i travagliadori?
A. sicuru, unu di i vantaghji di l'usu di robot per pick and place hè di prutege i travagliadori da e ferite. Un travagliadore pò trattà 5 ~ 6 unità di macchina CNC.
D. chì tipu di pruduttu pò aduprà un robot di carica è scaricamentu?
A. Ogni caricatore roboticu pò esse dotatu di strumenti adatti à l'estremità di u bracciu chì sò cumpatibili cù a vostra macchina è u vostru pruduttu. Sò estremamente precisi è anu ancu a destrezza per manipulà a parte cun cura.
D. Solu una estremità di l'arnesi di u bracciu pò esse aduprata per caricà è scaricà u robot?
A. U bracciu roboticu industriale pò mudificà u prugramma è a pinza di presa, cambiamenti rapidi in u magazzinu intelligente, velocità di debugging, eliminendu a necessità di impiegati ma ancu per u tempu di furmazione, pò esse messu rapidamente in pruduzzione.
D. Ci hè qualchì altru meritu di carica è scaricamentu di robot?
A. Migliurà a qualità di l'aspettu di a pezza: linee di pruduzzione automatizate da robot, da l'alimentazione, u serraggio, u tagliu interamente da i robot, à a riduzione di i ligami intermedi, a qualità di a pezza hè assai migliurata, in particulare una superficia più bella.
D. Pudete furnisce suluzioni cumplette per u caricamentu è u scaricamentu di robot?
A. sicuru, pudemu fà què inseme cù u nostru rivenditore.
Categurie di prudutti
-

YH1006A-175: Robot di saldatura à 6 assi per alta precisione...
-
Robot di saldatura Mig à 6 assi per scaffale di almacenamentu
-

Stazione di travagliu di saldatura à arcu roboticu à 7 assi
-

Pallettizatore roboticu di 6 DOF 165 kg di carica utile
-
Robot di saldatura Tig cù alimentatore di filu
-

Robot di saldatura à arcu di pezzi d'auto



